






步进电机如何减速?
步进电机是一种常用、应用广泛的驱动电机,步进电机通常需要搭配减速设备一起使用,以达到理想驱动效果;步进电机常用的减速设备和方法有如减速齿轮箱、编码器、控制器、脉冲信号等。
脉冲信号减速:步进电机转速度,是根据输入的脉冲信号的变化来改变的。从理论上讲,给驱动器一个脉冲,步进电机就旋转一个步距角(细分时为一个细分步距角)。实际上,如果脉冲信号变化太快,步进电机由于内部的反向电动势的阻尼作用,转子与定子之间的磁反应将跟随不上电信号的变化,将导致堵转和丢步。
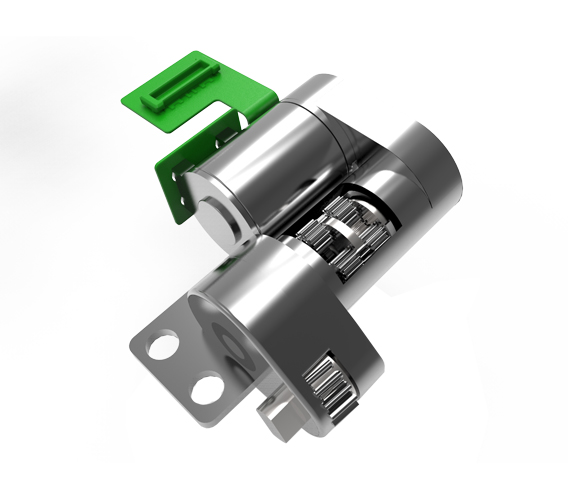
减速齿轮箱减速:步进电机搭载减速齿轮箱一起使用,步进电机输出高速、低扭矩转速,连接减速齿轮箱,齿轮箱内部减速齿轮组啮合驱动形成的减速比,将步进电机输出的高速降低,而且提升驱动扭矩,达到理想驱动效果;减速效果取决于齿轮箱的减速驱动比,减速比越大,输出转速越小,反之亦然。
曲线指数控制速度:指数曲线,在软件编程中,先算好时间常数存贮在计算机存贮器内,工作时指向选取。通常,完成步进电机的加减速时间为300ms以上。如果使用过于短的加减速时间,对绝大多数步进电机来说,就会难以提升步进电机的高速旋转。
编码器控制减速:PID 控制作为一种简单而实用的控制方法 , 在步进电机驱动中获得了广泛的应用。它根据给定值 r( t) 与实际输出值 c(t) 构成控制偏差 e( t) , 将偏差的比例 、积分和微分通过线性组合构成控制量 ,对被控对象进行控制 。文献将集成位置传感器用于二相混合式步进电机中 ,以位置检测器和矢量控制为基础 ,设计出了一个可自动调节的 PI 速度控制器 ,此控制器在变工况的条件下能提供令人满意的瞬态特性 。文献根据步进电机的数学模型 ,设计了步进电机的 PID 控制系统 ,采用 PID 控制算法得到控制量 ,从而控制电机向指定位置运动 。最后 ,通过仿真验证了该控制具有较好的动态响应特性 。采用 PID 控制器具有结构简单 、鲁棒性强 、可靠性高等优点 ,但是它无法有效应对系统中的不确定信息 。