






机器人为什么用减速机?
机器人适用减速机的原因:
1.工业机器人的关节需要撑住后端机构由于重力产生的扭矩。
2.工业机器人关节转速不高。机器人关节角速度很低,可电机在极低的速度下转动是不平稳的,控制不易,需要一个机械让电机在较合理的转速下运动,保证运动的平顺。
3. 为保证工业机器人在生产中能够可靠地完成工序任务,并确保工艺质量,对工业机器人的定位精度和重复定位精度要求很高。
为了解决以上问题需要在提升扭矩、保证电机转速和控制分辨率和闭环精度三方面找到有效的解决办法,而减速机就能轻松解决这些问题:
一、提扭矩
一个50:1的谐波减速机就能轻松将一个额定100mNm的电机的额定扭矩提升到5Nm,而如果是直驱的5Nm电机就需要更大的体积来保证其输出功率,想做的更小就要增加电机的电流,这样又会造成电机的严重发热,降低了电机的使用寿命和可靠性,而维持相同扭矩增加减速机的电机发热量只是原来的1/2500。
二、保证电机的转速
本来工业机器人的关节转速就不高,一般都是每秒一两转,额定100mNm的电机轻松跑6k转/min。要是嫌转的不够快?解决办法就是电压,但这要考虑的是轴承和转子是否撑得住。
三、控制分辨率和闭环精度
分辨率高的好处是转速控制可以更精确,由于量化造成的阶跃产生的高频分量变得很小,控制更加平滑。转子等效的转动惯量提高到了2500倍,使得控制环路的滞后环节受转子惯量占主导,而转子由于直接受电磁力的驱动从而没有由于刚度造成的扭矩滞后,比直驱要好控。
机器人减速机特点:
1.中空结构:机器人专用减速机的转盘为中空结构,电机连接在侧边,方便冶具中的气管、电线安装。
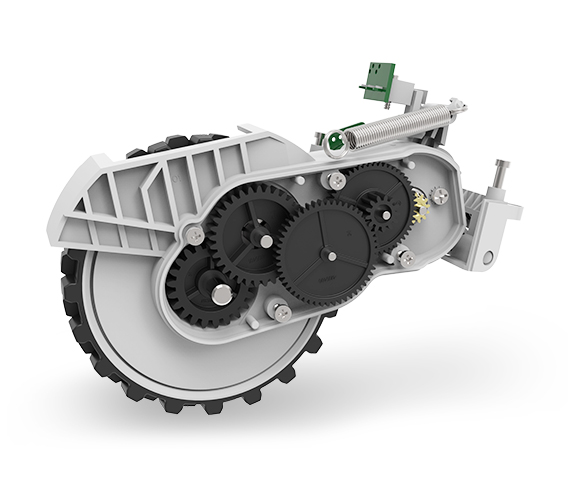
2.高重复定位精度:机器人专用减速机采用单级螺旋齿轮减速方式来增大输出扭矩,齿轮精度等级达5级以下,加之灵活的调隙机构,通过改变两齿轮中心距的方式来控制侧隙,使得中空旋转平台的空回极小,重复定位精度在5弧秒以下。
3.高刚性:机器人专用减速机的转盘由一套精密交叉滚子轴承支撑,轴承中的滚子呈90度交错排列,并且滚子直径略大于轴承内圈与外圈间的滚道尺寸,使得交叉滚子轴承的内外圈及滚子之间存在预紧力,由此轴承支撑的旋转平台转盘能够承 受径向、轴向、倾覆等各种力矩,其刚性是传统轴承的10倍以上。
4.高旋转精度:机器人专用减速机在组装完成后,以平台的交叉滚子轴承为旋转中心,再次对转盘的外径,端面进行磨削(标准级为精车),保证转盘的同轴度,平行度等形位公差。
使用减速机的缺点:
1. 如果配置了减速机而编码器又装在电机端的话,减速机的制造精度会影响实际精度;
2. 多级减速机里的齿隙油膜厚度变化等小误差经过多级放大还是会造成重复精度的下降;
3. 还有减速机毕竟有齿轮啮合或是柔轮变形,有寿命限制;
4. 对多连杆机构齿隙的非线性耦合使得机器人的绝对精度较差,所以工业机器人只谈重复定位精度不谈绝对精度,从而使得机器人很难纯粹地进行离线编程,提高了部署的难度和成本。
机器人可以使用那些减速机:机器人可使用RV减速机、谐波减速机、行星减速机、蜗轮蜗杆减速机等;